
|
Der Schrittmotor |
|
Beinahe grenzenloser Einsatz! |
|
Inhalt
Der Schrittmotor 1. Funktionsweise 2. Elektrischer Aufbau 3. Mechanischer Aufbau 4. Steuerungsmöglichkeiten 5. Anwendungsgebiet 6. ATmega-Demo |
|
Der Schrittmotor Schrittmotoren gehören zu der Familie der Elektronikmotoren, da sie im handelsüblichen Gebrauch nur mit Elektronik betrieben werden können. |
|
1. Funktionsweise Das wesentliche Merkmal des Schrittmotors ist, dass der Läufer nicht bestromt wird. Die Drehung des Rotors wird durch elektromagnetische Kräfte zwischen den Polen des Ständers und des Läufers erzeugt. Der Strom wird nicht mechanisch über einen Kollektor und Kohlebürsten, sondern mit elektronischen Ventilen (Transistoren, FET’s, Thyristoren, Triacs) kommutiert.
Vollschrittbetrieb Ø Auflösung = Anzahl Schritte pro Umdrehung Ø minimaler Schrittwinkel = 360° / Anzahl Schritte pro Umdrehung Ø Mehr Kraft durch Ansteuerung von zwei Spulen gleichzeitig
Halbschrittbetrieb Ø Auflösung = 2x Anzahl Vollschritte Ø Minimaler Schrittwinkel = 360° / 2x Anzahl Schritte pro Umdrehung Ø Weniger Ruckeln durch die feinere Auflösung Ø Weniger Kraft durch Ansteuerung von zeitweise nur einer Spule
Microschrittbetrieb (1/4-, 1/8-, 1/16- … Schritt) Ø Auflösung = mehrfaches der Anzahl Vollschritte/Umdrehung Ø Kein oder kaum Ruckeln durch die feine Auflösung Ø kompliziertere Steuerung / Software
2. Elektrischer Aufbau und Ansteuerung
Unipolar Besteht jede Erregerwicklung aus zwei Spulen, respektive eine Spule mit einem Mittelabgriff, so kann der Schrittmotor unipolar betrieben werden. Der Magnetfluss im Eisenkern wird dann durch das Schalten der einen oder anderen Spule umgepolt. Da ein gemeinsamer Massepol (z. B.. Mittelabgriffe) benutzt werden kann, lässt sich der elektronische Treiber mit nur vier Transistoren oder FET’s der gleichen Sorte aufbauen, da NUR positives Potenzial ein- oder ausgeschaltet werden muss. Selbstverständlich kann man den gemeinsamen Pol auch positiv speisen und die Spulenausgänge auf Masse schalten, was in der Elektronik wohl üblicher ist. So haben wir das auch bei unserem Versuchsaufbau realisiert.
Unipolar Vollschrittbetrieb Unipolar Halbschrittbetrieb
Bipolar Ist die Erregerwicklung nur mit einer Spule ausgeführt, muss der Schrittmotor bipolar betrieben werden. Dabei muss die Spannung an der Spule umgepolt werden, um auch das Magnetfeld des Eisenkerns zu drehen. Die Elektronik für diese Art der Ansteuerung ist etwas komplizierter, da mit vier Gegentaktstufen gearbeitet werden muss. Dafür gibt es aber auch integrierte Treiberschaltungen in ICs, wie z. B.. L298N, die gleich vier Gegentaktstufen in einem Gehäuse beherbergen. Schliesslich benötigt nun jeder der vier Anschlüsse abwechslungsweise positives und negatives Potenzial.
Bipolar Vollschrittbetrieb Bipolar Halbschrittbetrieb
Allgemeines zum Microschritt: Durch Pulsweitenmodulation (PWM) der Spulenbestromung können je nach Verhältnis der Ströme der zwei Spulen jegliche zwischenschritte zwischen den Vollschritten realisiert werden. Je nach Auflösung dieser Microschritte wird dabei fast eine Sinus– resp. Cosinusförmige Bestromung der Spulen erreicht, womit die eigentlichen Schritte nicht mehr als Ruckeln empfunden werden können. Diese Ansteuerung macht allerdings nur bei geringen Drehzahlen Sinn, je höher die Drehzahl und je kürzer auch die Ansteuerungszeiten der Spulen, desto mehr wird der Spulenstrom sowieso verzerrt und der Ruckeleffekt wird da auch geringer. Viele Schrittmotoren-Controller entscheiden da selbstständig als Funktion der Schrittfrequenz zwischen den Ansteuermodi. Die Funktionsweise ist dann schon sehr nahe an deren eines AC-Servomotors, welcher den vergleichsweise teuren Schrittmotor auf dem Markt der Positioniersteuerungen zunehmend verdrängt.
3. Mechanischer Aufbau Die verschiedenen Bauformen von Schrittmotoren lassen sich grob in zwei Kategorien einteilen. Zum einen gibt es Motoren mit permanent magnetisiertem Läufer, zum anderen solche ohne.
Die permanent magnetisierten Läufer (Permanentmagnetmotor) können als Scheibe oder Zahnrad mit abwechselnder Magnetisierung ausgeführt sein. Es folgt also immer ein Nordpol auf einen Südpol. Dies ist allerdings nur bis zu einer sehr begrenzten Anzahl Schritte pro Umdrehung realisierbar, da dann die Kommutierungsfrequenz zu hoch und das Drehmoment zu gering wird.
Als Reluktanzschrittmotor wird ein Motor bezeichnet, dessen Läufer nur aus einem Weicheisenzahnrad besteht. Bei dieser Variante ist der Läufer nicht magnetisiert. Die Ständerpole sind auch gezahnt und um Bruchteile eines Zahnes des Läufers versetzt an dessen Umfang angeordnet. Sie werden nacheinander bestromt und der Läufer bewegt sich - magnetisch angezogen wie beispielsweise bei einem Relais - immer um den Bruchteil der Länge eines Zahnes, welcher genau der Kehrwert der Polzahl ist (bei 4 Ständer-Polen also beispielsweise ¼ Zahn pro Schritt). Wenn alle Pole des Ständers einmal bestromt wurden, hat sich der Läufer also genau um einen Zahn gedreht.
Eine andere Möglichkeit besteht darin, den Läufer aus zwei separaten Zahnkränzen aufzubauen, was dann als Hybridschrittmotor gilt. Dieser besteht aus einem gewöhnlichen Stab-Permanentmagneten, der in die Mitte (axial) platziert ist. Die Magnetfeldlinien werden nun durch die Weicheisen-Zahnkränze an den Enden des Stabmagneten verlaufen. Dadurch werden die Zähne des einen Zahnkranzes alle zu magnetischen Nordpolen und die des anderen zu Südpolen. Wählt man zwei Zahnräder mit gleich vielen Zähnen und montiert sie um einen halben Zahn versetzt zueinander, entsteht im Endeffekt, wenn die beiden nahe genug beieinander liegen und ein Pol des Ständers sich über beide Zahnräder ausdehnt, ein Gebilde mit sich abwechselnden Nord- und Südpolzähnen UND Dauermagnetisierung.
4. Steuerungsmöglichkeiten Zur einfachen Funktionskontrolle kann ein Schrittmotor auch ganz einfach mit Tastern von Hand gesteuert werden. Im industriellen Bereich allerdings, wo der Schrittmotor eine konkrete Aufgabe erfüllen muss, übernehmen dies elektronische Schaltungen. Vielfach wird mit Schrittmotoren-Controllern auf Logikbasis gearbeitet, die von einer Elektronik angesteuert werden. Diese Controller erhalten an den Eingängen Informationen über Richtung, Voll- oder Halbschritt, Schrittfrequenz, Stromüberwachung und je nach Modell - noch viele weitere Optionen. Diese Informationen verarbeiten sie nach ihrer Logik und an den Ausgängen kann - mit Verstärker (ein so genannter „Treiber“) - ein Schrittmotor angeschlossen werden. Der L297 ist einer der bekanntesten dieser Treiber, welcher direkt in der Elektronik verbaut wird. Es gibt aber auch Komplett-lösungen, also eine Elektronik mit Controller mit Treiber in einem. Diese können ohne tiefgründige Elektronik– oder Programmierkenntnisse für einfache Schrittmotor-Fahrweisen per Software programmiert werden. Die Ansteuerung kann aber auch mittels Software gesteuert werden, z. B.. über einen Mikrocontroller oder PC. Dabei wird eine Treiberstufe direkt angesteuert (erfordert Echtzeit-Lauffähigkeit). Um den Programmcode in einem Mikrocontroller zu vereinfachen und zu verkürzen, wird häufig Hard- und Softwarelogik gemischt angewandt. Zum Beispiel steuert ein Rechner, auf welchem gleichzeitig noch 3-D-Berechnungen ausgeführt werden, mehrere Schrittmotoren-Controller mittels Bussystem an. Die Controller kümmern sich denn selbst darum, wie die Motoren gerade angesteuert werden müssen. Dies hat sogar eine Steigerung der Betriebssicherheit zur Folge, da die Hardware weniger stör- und fehleranfällig ist.
5. Anwendungsgebiet · CNC-Fräsmaschinen und -Drehbänke · Stellantriebe (Ventile, Klappen, Fader) · Drucker und Plotter · Robotertechnik · Stoppuhren
In all diesen Gebieten wird oder wurde der Schrittmotor jedoch vom AC-Servodrive verdrängt, da dieser meist günstiger ist, und vor allem eine bessere Drehzahl-Drehmoment-Kennlinie aufweist
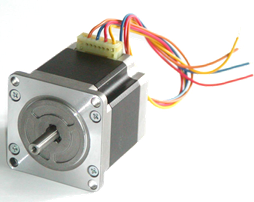
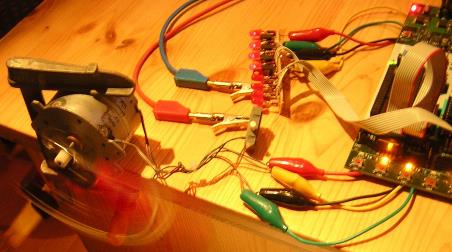
6. ATmega-Demo Unser Demonstrations-Modell besteht aus einem 8-bit Mikrocontroller, einer gebastelten MOSFET-Treiberstufe und einem unipolaren Schrittmotor. Ein Mikrocontroller ist ähnlich aufgebaut wie ein kompletter PC, er hat verschiedene Speicher (RAM, Flash, EEPROM…) eine CPU, ein internes Bussystem und abhängig vom Typ noch viele weitere Futures. Sie benötigen lediglich 5V Betriebsspannung und haben einen geringen Stromverbrauch. Für den Betrieb wird auch sehr wenig Peripherie benötigt. Wir benutzen einen ATmega16 von ATMEL, den wir mit einer Taktfrequenz von 8MHz betreiben. Dieser hat vier Ports à je 8 Bits womit überaus genug Anschlüsse für Ein- oder Ausgänge vorhanden sind. Die vier Treiber-MOSFETS (IRFZ 34N) haben ein maximales Schaltvermögen von 18A bei UGS von 10V. Weil diese aber direkt mit dem µC angesteuert werden (5V), wird RDSon[3] einiges grösser, wobei 5A wohl nicht überschritten werden dürfen, da er sonst „verbrennt“: Der Schrittmotor stammt von einem alten Drucker, hat eine Auflösung von 48 Schritten pro Umdrehung, was dann im Vollschrittbetrieb einen minimalen Schrittwinkel von 7.5° ergibt (Halbschritt 3.75°). Die Betriebsspannung ist bei allen Schrittmotoren auf den Strom anzupassen. Bei konstanter Spannung fliesst bei langen Schritten mehr, bei schnelleren (kürzeren) weniger Strom. Dies hat ganz einfach mit dem Verhalten einer Spule zu tun, wessen Spannung am Anfang fast null ist, und mit der Zeit 1/exponentiell zunimmt (gerade umgekehrt wie das bekannte UT-Diagramm einer Kondensatorladung). Das Haltemoment des Motors hängt vom anliegenden Magnetfeld ab, dieses wiederum vom Strom, welcher durch eine Regelelektronik oder vom Programm gesteuert angepasst werden müsste. Bei unserem Modell ist das aber nicht nötig, da ja schliesslich kaum Drehmoment benötigt wird.
Das Programm besteht eigentlich aus zwei zusammengefügten, per Schalter umschaltbaren Programmen. Bei dem einen kann man mit zwei Tastern die Geschwindigkeit in vielen Stufen von vorwärts bis rückwärts steuern und per Schalter zwischen Vollschritt- und Halbschritt umschalten, um die Funktionsweisen zu vergleichen. Der andere Programmteil ist ein Anwendungsbeispiel. Per Schalter wählbar lässt sich mit zwei Tastern oder einem Potenziometer (über internen A/D-Wander) eine Sollposition (Anzahl Schritte) einstellen, worauf der Schrittmotor diese Position mit Anfahr- und Bremsrampe anfährt. Die Umschaltung zwischen Halb- und Vollschritt erfolgt geschwindigkeitsabhängig automatisch. Das Programm ist in C-Code geschrieben und wird mit dem C-Compiler CodeVisionAVR in Assembler und anschliessend in ein HEX-File umgewandelt. Dieses gelangt danach über die RS232-Schnittstelle und das Programmierboard (STK500) in den Mikrocontroller.
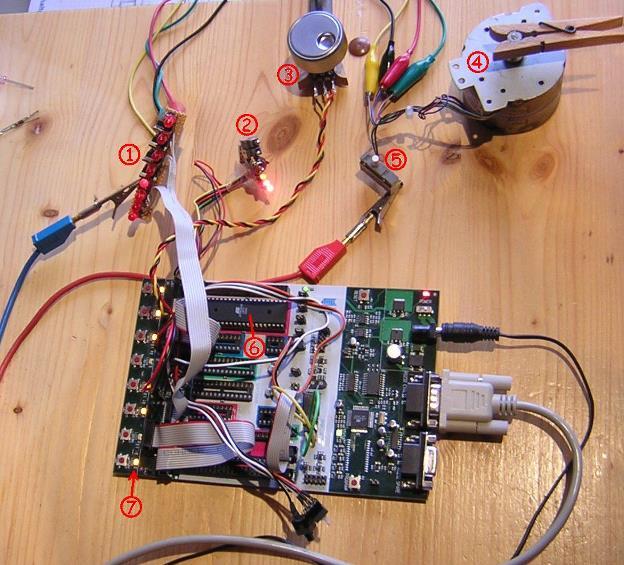
Ganzer Versuchsaufbau:
Im Bild sehen wir die Treiberstufe 1 mit vier weiteren Anzeige LED’s, Bedienschalter 2 für die Programmwahl, Bestimmung von Voll- oder Halbschritt respektive Poti oder Taster und Anzeige-LED’s Potenziometer 3 zur Sollposition-Einstellung (falls gewählt), und der unipolare Schrittmotor 4 mit einer thermischen 1A-Sicherung 5. In der unteren Bildhälfte das Programmierboard STK500 mit dem Mikrocontroller ATmega16 6 auf dem obersten Sockel, und weiteren Bedientastern und Anzeige-LED’s 7 am linken Rand des Boards. |
|
V 29.12.06 aktualisiert: 03.02.2011 |
|
(Bearbeitet für einen Vortrag im Fachunterricht der AGS Basel) |